印度宣布2026年新车强制前装V2V?但是偏向于一阶段的预警类安全场景

昨天看到车路云群里大众汽车CARIAD中国 梁锐总发布了一个新闻:印度2026年要强装V2V终端,我有点震惊,第一次听说V2X的推动发生在新德里。
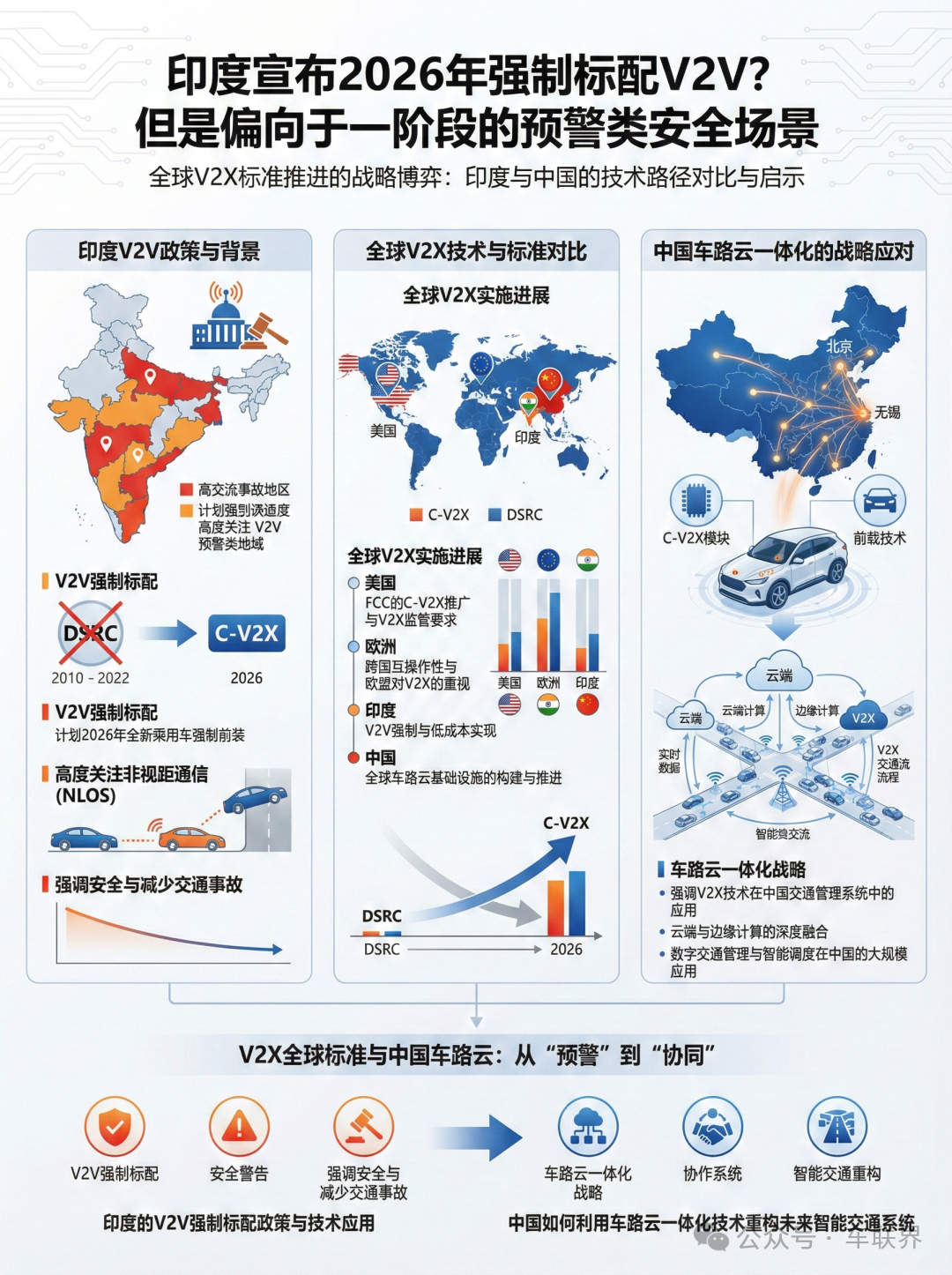
据印度道路运输和高速公路部(MoRTH)释放的明确信号:印度政府计划在2026年底前出台法规,强制要求所有新生产的乘用车前装V2V(车对车)直连通信技术。紧接着,印度的新车评价规程(Bharat NCAP 2.0)也宣布将在2027年把V2X正式纳入核心的五星安全评分体系。
说实话,刚看到这个消息时,国内很多同行的第一反应是错愕:在一个以低成本小型车为主、甚至连传统ADAS(高级驾驶辅助系统)都还没完全普及的市场,居然要直接跳步、强制标配V2X?
因此,我去学习了一下印度最新发布的《2025版国家频谱分配计划》(NFAP-2025),想从中了解一下他们的分配策略和技术逻辑,读完后我不仅收起了轻视,反而感到一种强烈的战略共振。印度的这一激进举措,不仅彻底宣判了全球V2X“路线之争”的终结,更像是一面镜子,清晰地映照出了中国“车路云一体化”战略在当今全球格局中绝对的领先身位。
我们可以从几个方面看一下印度想“弯道超车”的底牌是什么,以及它对中国车路云产业究竟意味着什么。
一、 印度的“血泪倒逼”:跳过DSRC,直接押注C-V2X
要理解印度的激进,必须先看看他们极其惨烈的交通现状。
印度拥有全球1%的汽车,却贡献了全球11%的交通事故死亡率(每年约17-18万人丧生)。在印度,夜间撞上停在路边不开双闪的卡车、北部冬季浓雾导致的几十辆车连环追尾,以及毫无规则的无信号灯路口侧碰,是致死率最高的几大元凶。
面对这些问题,传统的单车智能(摄像头和雷达)几乎束手无策,因为它们受限于“视距(Line-of-Sight)”——大雾天看不见,大车挡住也看不见。印度政府极其务实地意识到:与其等昂贵的高阶自动驾驶降本,不如赋予车辆一种“无线电第六感”。
在技术路线的抉择上,印度展现了惊人的后发优势。他们没有像欧美早年那样在Wi-Fi演进的DSRC技术上浪费时间。印度的电信工程中心(TEC)经过实测发现,基于蜂窝网络的C-V2X技术在通信距离上比DSRC远20%-30%,在非视距(NLOS)盲区的抗干扰能力更是形成碾压。
于是,印度果断决策:全面抛弃DSRC,直接倒向C-V2X。为了扫清商业化障碍,印度的《2025版国家频谱分配计划》不仅将5875-5925 MHz频段划拨给V2X,甚至破天荒地允许其中30MHz的V2V通信完全免收频谱使用费。频谱免费加上国家强制,彻底打通了OEM(整车厂)前装V2X的经济账本。

二、 “时差”的显现:印度的“Day 1”预警与中国的“Day 2”协同
如果我们将印度的应用场景与中国进行对标,会发现一个非常有趣的“技术时差”。
印度目前主推的V2V强制前装,其核心场景是:高速静止车辆碰撞预警、大雾天气连环追尾预警、以及路口盲区横向来车预警。从技术定义上看,这完全属于我们前几年在T/CSAE 53标准中定义的“Day 1(阶段一):辅助预警类场景”。印度解决的是最基础的“活下来”的问题——车与车互相广播位置,通过HMI屏幕滴滴滴地报警,提醒司机踩刹车。
而此时此刻的中国,车联网的巨轮早已驶出了单纯的“听觉/视觉预警”浅水区,全面过渡到了以T/CSAE 157标准为代表的“Day 2(阶段二):协同决策控制类场景”。
什么叫协同决策控制? 这意味着V2X信号不再只是仪表盘上的弹窗,而是直接“杀”进了汽车的底盘,是一种进域的可以参与车辆决策规划控制的能力。 我们在之前的文章中深度解析过:
中国目前在搞的C-AEB(网联式自动紧急制动),是将V2X的超视距信号与雷达数据做底层融合,直接触发车辆的全力制动。
我们推进的场景4.12 车辆智能编队行驶,利用高达50Hz的高频V2V通信,让重卡在高速上实现间距仅十几米的“数字挂钩”和联合控车。
甚至在城市级应用中,中国正在普及的“交通信号灯上车”与C-ACC,不仅让车能看懂红绿灯倒计时,还能让云端大模型直接指导车辆以最节能的速度(绿波引导)平滑通过路口。
印度还在致力于让两辆车互相“打招呼”,而中国已经开始利用上帝视角的“云”和智慧的“路”,对全局交通流进行深度调度与重构。这种代差,正是中国过去几年坚持重资产投入积累下的战略护城河。

三、 争议的终结:印度入局对全球自动驾驶的洗牌意义
在国内,关于“车联网是不是伪需求”、“单车智能能不能包打天下”的争论从未停止。但印度这一纸2026年强制前装的政令,实际上宣告了这场全球辩论的彻底终结。
我们还是可以从全球的几个国家进行对比一下,就可以看出越来越清晰的趋势:
美国:FCC(联邦通信委员会)已经下达死命令,要求2026年底前全面淘汰DSRC,彻底转向C-V2X,并出台了国家级加速部署计划。
韩国:明确废弃WAVE标准,全面拥抱LTE-V2X,并划拨专属频谱铺开全国路网。
欧洲:Euro NCAP 2026版协议已经事实性地将V2X能力作为高星级安全评价的必选项。
印度:直接掏出“2026年强制标配”的杀手锏。
是不是非常明确的全球共识已经悄然形成?无论单车智能的端到端大模型吹得多么神乎其神,全球各主要汽车工业国和人口大国的立法者,都已经达成了一个底线共识:“通信即安全冗余”。当自动驾驶步入L3/L4的深水区,利用C-V2X构建超视距的“数字契约”,是超越物理传感器极限的唯一且必选的解法。

四、 中国方案的降维输出:从“内生增长”到“全球规则制定”
在全球都在为V2X通信标准“补课”的时候,中国已经完成了从“单点技术”向“国家级基础设施”的升维。
2024年至今,中国政府推动的“车路云一体化”二十城超级试点,不是为了解决简单的防撞报警,而是为了打造数字经济的新引擎。我们在北京亦庄、无锡、重庆、武汉等地,不仅部署了上万套高标准的RSU和边缘计算MEC节点,更在底层推动通信、算力、高精地图的深度融合。
中国的行业领先作用,正体现在强悍的“体系输出能力”上:首先是标准的倒逼与收敛。C-NCAP 2024版将“有遮挡的交叉路口碰撞(C2C SCPO)”等V2X场景纳入主动安全测试,这比印度的Bharat NCAP更早、更全面地逼迫国内车企完成了PC5直连通信的前装量产。而且我们目前在智能网联汽车方面也在密集的出台国家标准。 其次是技术出海的降维打击。当跨国车企还在为如何应对印度的V2V强制标准寻找低成本硬件时,中国的新能源车企和自动驾驶企业(如小马智行、文远知行)早就带着具备L4级车路协同能力的完整生态,开始向中东、东南亚进行技术输出了。

结语
印度对V2V技术的全面强制化,是一个极具标志性的历史节点。它告诉我们,由智能手机引领的通信革命,正在向智能汽车完成伟大的交接。
在这个浪潮中,印度用行政指令守住生命安全的底线,而中国,则通过“车路云一体化”的宏大实践,稳稳地握住了通向未来全自动驾驶时代的全球规则方向盘。对于中国车企和产业链来说,我们不仅要在国内卷赢“单车智能”,更要坚定地依托国家的“车路云”大网,把属于中国标准的安全、高效与智能,推向全球。

重庆: 重庆市高新区科学谷数智科创园3幢8-10层
北京: 北京市朝阳区安定路5号院19号城奥大厦13层
邮箱地址: icvmkt@cictci.com
销售电话: 023-65165656(重庆) 010-64286688(北京)
售后电话: 400-666-3620
关注我们的官方媒体:


